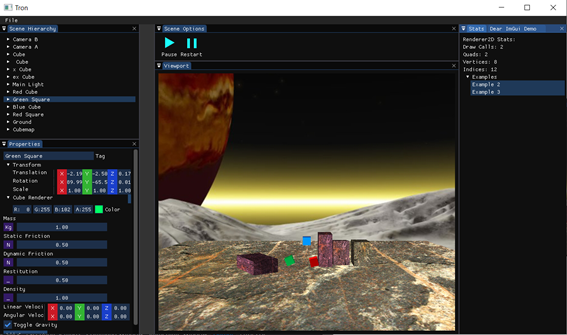
Take a look inside the inner workings of the ongoing game-engine project, Becketron. Get a high-level look via the design-architecture diagrams and documentation or dive deeper into the open-source code
Take a look inside the inner workings of the ongoing game-engine project, Becketron. Get a high-level look via the design-architecture diagrams and documentation or dive deeper into the open-source code

A Webapp is developed as part of this project that emulates the basic functionality of a social-media webapp. The backend API for the app is developed using Node.js/Express.js framework and the front-end is developed using React.js with state-management based on Redux. The app and user info is stored on an online MongoDB database.

Fisherteknik's Robo-Tx is programmed through the Arduino micro-controller and an HMI GUI is created using the Processing graphical library to control the robot from a PC

Python's standard Sockets API is used to simulate an Oscilloscope (running as a server) and a client side Commnad line to send SCPI commands to the simmulated Oscilloscope.
The project explores the advantages of writing multi-threaded code over traditional, sequential style code. A multi-threaded C-program is created on a Raspberry-pi that makes use of the multiple cores of a Raspberry-pi and runs simultaneously. Shell scripts and Perl scripts are used to analyse the background OS data and extract the useful information.
A Team project that involved building an SMD (Surface-Mounted Device) component counter for a company. From exploring existing exemplars in the market to desiging, programming, hardware-setup and 3D-printing, the project involved it all.

A C program was written to exploit the sensor data from the sensors mounted on the EVE3 robot, in order to make the robot autonomous in terms of performing a specific task.

In this project, a Staubli robot is used to decorate a cake. The program was first tested withing the simulation environment and then ran on the physical system.